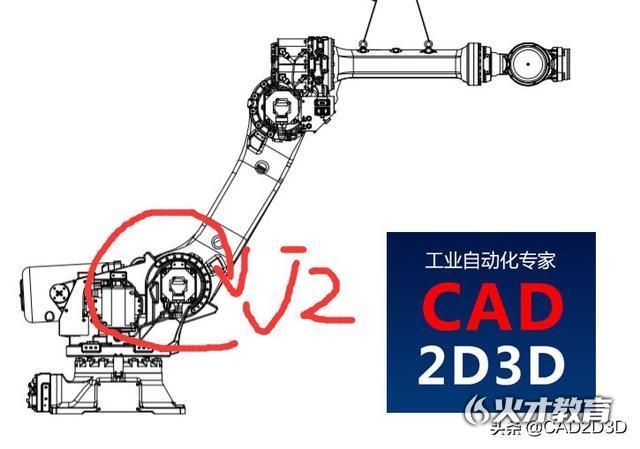
刚刚在车间里研究日本和德国的机器人,发现稍微大一点的机器人,J2都会配置一个平衡缸,日本FANUC机器人用的是弹簧式平衡,德国KUKA用的液压式(隔膜蓄能器)或配重块的方式,我个人认为液压(隔膜蓄能器)的方式是最好的,出力基本恒定,而且占用空间小。

机器人J2轴为什么要用平衡缸?
先看一下实际情况,下图是FANUC R-2000iC/125L机器人1/2/3轴电机上的铭牌,电机功率都是4.3KW,机器人4/5/6轴电机是2KW。

细心的同学肯定发现了,原来机器人1/2/3轴的电机功率是一样的,大家有没有想想,为什么会是一样的?
看一下6轴关节型机器人,在末端负载相同的情况下,负载对J2轴产生的扭矩肯定要远远大于J3轴,通过机器人臂展尺寸,可以推断出,J2轴需要的扭矩大概是J3的2倍,理论上J2和J3轴不能使用同一个规格的电机,为了减少J2轴电机,工程师想出了了一个好方法,那就是通过使用配重的方式来抵消部分扭矩,使整个力系出于平衡状态,这样对电机的扭矩要求就会大幅缩小。
配重有很多方式,使用配重块,成本最低,但会增加转动惯量,使用弹簧缸,出力不恒定,因此,只有液压缸(隔膜蓄能器)这样方式才是最理想的。
下图是机器人J3轴使用配重块的情形:

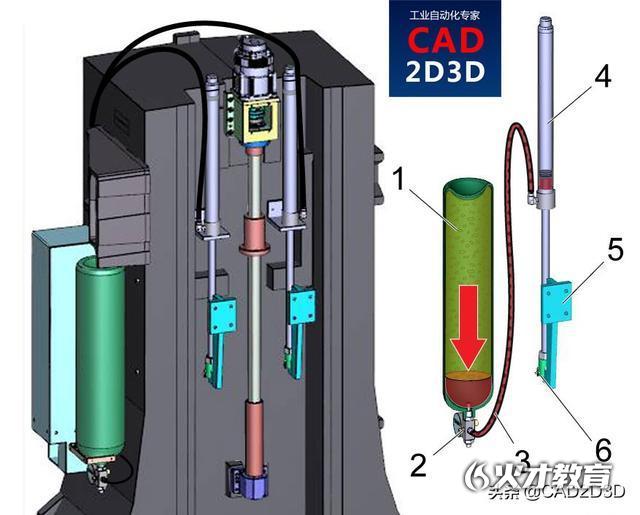
下面看一下KUKA 160kg机器人平衡缸:

下面是KUKA平衡缸的原理图:
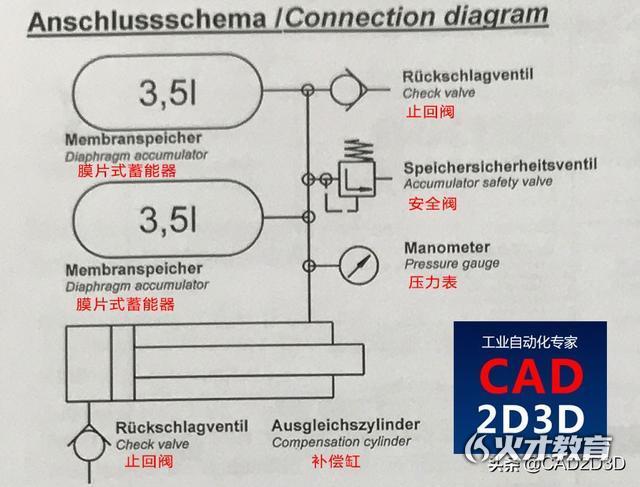
KUKA机器人用的液压平衡缸,缸径40mm,油压20MPa,允许负载20KN左右,也就是说这个平衡缸会维持一个20kN的拉力。
下面算一下机器人负载160kg时,对J2轴产生的扭矩:
负载对J2轴扭矩T1=F(负载重量)×L1(负载力臂)=160kg×9.8N/kg×2米≈3200N.m
下面算一下平衡缸可抵消多大的扭矩:
平衡缸对J2轴的扭矩T2=F(平衡杠推力)×L2(平衡杠力臂)=20kN×0.1米=2000N.m
下面算一下4.3kW的电机减速机产生的扭矩:
J2轴最大的旋转角速度w=105°/s(1.83rad/s),转速n=17.5转/分钟
T3=9550P/n=9550×4.3/17.5=2346N.m
因此,T3>T1-T2,满足使用要求,通过以上计算,符合预期。
现在应该可以明白工程师为什么要选用平衡缸了吧,其实平衡缸不仅用在机器人上,在机床、桁架机械手、压力机等设备上都能见到。
日本和德国的机器人还是值得研究和学习的,通过多看多想,达到知其然知其所以然,最终完全掌握机器人的设计和制造,国产机器人如果能掌握其中10%的精髓,也不至于现在这个局面。
对工业机器人感兴趣的,可以看一下专栏《机器人及自动化生产线方案设计大师》。
本文来源:https://www.yingxiaoo.com/65169.html